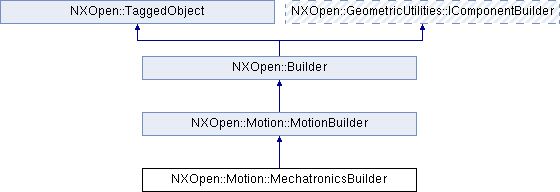
Represents a Motion::Mechatronics builder
To create a new instance of this class, use NXOpen::Motion::MechatronicsCollection::CreateMechatronicsBuilder
Default values.
More...
Public Types | |
| enum | MechatronicsModelType { MechatronicsModelTypeAmesim, MechatronicsModelTypeMatlab } |
| the mechatronics type - possible values are Matlab or Amesim More... | |
| enum | PurposeType { PurposeTypeImport, PurposeTypeExport } |
| the mechatronics purpose type - possible values are Import and Export More... | |
| enum | SolverCommunicationIntervalType { SolverCommunicationIntervalTypeConstant, SolverCommunicationIntervalTypeVariable } |
| the mechatronics communication interval type - only for Amesim! - possible values are Constant and Variable More... | |
| enum | SolverIntegrationType { SolverIntegrationTypeCoSimulation, SolverIntegrationTypeModelExchange } |
| the mechatronics integration type - possible values are ModelExchange and CoSimulation More... | |
Public Member Functions | |
| NXString | ActiveParameterGroupName () |
| Returns the active configuration parameters group name Created in NX11.0.0. More... | |
| NXString | ActivePortVariableGroupName () |
| Returns the active port variable group name Created in NX11.0.0. More... | |
| NXOpen::Expression * | CommunicationInterval () |
| Returns the communication interval Created in NX11.0.0. More... | |
| NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType | CommunicationIntervalType () |
| Returns the communication interval type - possible values are Constant, Variable Created in NX11.0.0. More... | |
| NXOpen::Motion::ConfigurationParameterList * | ConfigurationParametersList () |
| Returns the configuration/watch parameters list Created in NX11.0.0. More... | |
| NXOpen::Motion::ConfigurationParameter * | GetConfigurationParameter (const NXString &inputName) |
| Searches for the watch parameter by name in the active group. More... | |
| NXOpen::Motion::ConfigurationParameter * | GetConfigurationParameter (const char *inputName) |
| Searches for the watch parameter by name in the active group. More... | |
| NXOpen::Motion::InputPortAssociation * | GetInput (const NXString &inputName) |
| Retrieves an input port association from its name. More... | |
| NXOpen::Motion::InputPortAssociation * | GetInput (const char *inputName) |
| Retrieves an input port association from its name. More... | |
| NXOpen::Motion::OutputPortAssociation * | GetOutput (const NXString &inputName) |
| Retrieves an output port association from its name. More... | |
| NXOpen::Motion::OutputPortAssociation * | GetOutput (const char *inputName) |
| Retrieves an output port association from its name. More... | |
| std::vector< NXString > | GetParameterGroupNames () |
| Allows retrieving the list of names of available configuration parameter groups. More... | |
| NXOpen::Motion::PortVariable * | GetPortVariable (const NXString &inputName) |
| Searches for the watch variable by name in the active group. More... | |
| NXOpen::Motion::PortVariable * | GetPortVariable (const char *inputName) |
| Searches for the watch variable by name in the active group. More... | |
| std::vector< NXString > | GetPortVariableGroupNames () |
| Allows retrieving the list of names of available port variables groups. More... | |
| NXString | HeaderFile () |
| Returns the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs) Created in NX11.0.0. More... | |
| NXOpen::Motion::InputPortAssociationList * | InputPortsList () |
| Returns the input ports list Created in NX11.0.0. More... | |
| NXOpen::Motion::MechatronicsBuilder::SolverIntegrationType | IntegrationType () |
| Returns the integration type - possible values are CoSimulation, ModelExchange Created in NX11.0.0. More... | |
| NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType | MechatronicsType () |
| Returns the mechatronics type - possible values are Matlab or Amesim Created in NX11.0.0. More... | |
| NXString | ModelFile () |
| Returns the model file - a file path to a MATLAB generated DLL or to an Amesim ame file Created in NX11.0.0. More... | |
| NXString | Name () |
| Returns the name of the element Created in NX11.0.0. More... | |
| NXOpen::Motion::InputPortAssociation * | NewInputListItem () |
| Creates a new input list item including expressions. More... | |
| NXOpen::Motion::OutputPortAssociation * | NewOutputListItem () |
| Creates a new output list item including expressions. More... | |
| NXOpen::Motion::OutputPortAssociationList * | OutputPortsList () |
| Returns the output ports list Created in NX11.0.0. More... | |
| NXOpen::Motion::PortVariableList * | PortVariablesList () |
| Returns the watch variables list Created in NX11.0.0. More... | |
| NXOpen::Motion::MechatronicsBuilder::PurposeType | Purpose () |
| Returns the purpose of the mechatronics element - possible values are Import, Export Created in NX11.0.0. More... | |
| void | ReadInterfaceFromFile (const NXString &filePath) |
| Reads the input/output definition of a mechatronics element from an external file, when purpose is specified as Export. More... | |
| void | ReadInterfaceFromFile (const char *filePath) |
| Reads the input/output definition of a mechatronics element from an external file, when purpose is specified as Export. More... | |
| void | RefreshLists () |
| Updates the list of available inputs and outputs (for both MATLAB ans Amesim models) and Configuration Parametersa and port Variables (for Amesim only) from the selected HeaderFile/ModelFile Created in NX11.0.0. More... | |
| void | SetActiveParameterGroupName (const NXString &name) |
| Sets the active configuration parameters group name Created in NX11.0.0. More... | |
| void | SetActiveParameterGroupName (const char *name) |
| Sets the active configuration parameters group name Created in NX11.0.0. More... | |
| void | SetActivePortVariableGroupName (const NXString &name) |
| Sets the active port variable group name Created in NX11.0.0. More... | |
| void | SetActivePortVariableGroupName (const char *name) |
| Sets the active port variable group name Created in NX11.0.0. More... | |
| void | SetCommunicationInterval (NXOpen::Expression *communicationInterval) |
| Sets the communication interval Created in NX11.0.0. More... | |
| void | SetCommunicationIntervalType (NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType communicationIntervalType) |
| Sets the communication interval type - possible values are Constant, Variable Created in NX11.0.0. More... | |
| void | SetHeaderFile (const NXString &filename) |
| Sets the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs) Created in NX11.0.0. More... | |
| void | SetHeaderFile (const char *filename) |
| Sets the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs) Created in NX11.0.0. More... | |
| void | SetIntegrationType (NXOpen::Motion::MechatronicsBuilder::SolverIntegrationType integrationType) |
| Sets the integration type - possible values are CoSimulation, ModelExchange Created in NX11.0.0. More... | |
| void | SetMechatronicsType (NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType mechatronicsType) |
| Sets the mechatronics type - possible values are Matlab or Amesim Created in NX11.0.0. More... | |
| void | SetModelFile (const NXString &filename) |
| Sets the model file - a file path to a MATLAB generated DLL or to an Amesim ame file Created in NX11.0.0. More... | |
| void | SetModelFile (const char *filename) |
| Sets the model file - a file path to a MATLAB generated DLL or to an Amesim ame file Created in NX11.0.0. More... | |
| void | SetName (const NXString &name) |
| Sets the name of the element Created in NX11.0.0. More... | |
| void | SetName (const char *name) |
| Sets the name of the element Created in NX11.0.0. More... | |
| void | SetPurpose (NXOpen::Motion::MechatronicsBuilder::PurposeType purpose) |
| Sets the purpose of the mechatronics element - possible values are Import, Export Created in NX11.0.0. More... | |
 Public Member Functions inherited from NXOpen::Motion::MotionBuilder Public Member Functions inherited from NXOpen::Motion::MotionBuilder | |
| double | DisplayScale () |
| Returns the icon display scale Created in NX5.0.0. More... | |
| NXString | GroupName () |
| Returns the group name Created in NX5.0.0. More... | |
| NXOpen::Motion::MotionObject::GroupType | GroupType () |
| Returns the group type Created in NX5.0.0. More... | |
| void | SetDisplayScale (double displayScale) |
| Sets the icon display scale Created in NX5.0.0. More... | |
| void | SetGroupName (const NXString &groupName) |
| Sets the group name Created in NX5.0.0. More... | |
| void | SetGroupName (const char *groupName) |
| Sets the group name Created in NX5.0.0. More... | |
| void | SetGroupType (NXOpen::Motion::MotionObject::GroupType groupType) |
| Sets the group type Created in NX5.0.0. More... | |
| Public Member Functions inherited from NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| NXOpen::NXObject * | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| virtual bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen::TaggedObject | |
| tag_t | Tag () const |
| Returns the tag of this object. More... | |
Detailed Description
Represents a Motion::Mechatronics builder
To create a new instance of this class, use NXOpen::Motion::MechatronicsCollection::CreateMechatronicsBuilder
Default values.
| Property | Value |
|---|---|
|
CommunicationInterval.Value |
0.01 (millimeters part), 0.01 (inches part) |
|
CommunicationIntervalType |
Constant |
|
IntegrationType |
CoSimulation |
|
MechatronicsType |
Amesim |
|
Purpose |
Import |
Created in NX11.0.0.
Member Enumeration Documentation
Member Function Documentation
| NXString NXOpen::Motion::MechatronicsBuilder::ActiveParameterGroupName | ( | ) |
Returns the active configuration parameters group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXString NXOpen::Motion::MechatronicsBuilder::ActivePortVariableGroupName | ( | ) |
Returns the active port variable group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Expression* NXOpen::Motion::MechatronicsBuilder::CommunicationInterval | ( | ) |
Returns the communication interval
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType NXOpen::Motion::MechatronicsBuilder::CommunicationIntervalType | ( | ) |
Returns the communication interval type - possible values are Constant, Variable
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::ConfigurationParameterList* NXOpen::Motion::MechatronicsBuilder::ConfigurationParametersList | ( | ) |
Returns the configuration/watch parameters list
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::ConfigurationParameter* NXOpen::Motion::MechatronicsBuilder::GetConfigurationParameter | ( | const NXString & | inputName | ) |
Searches for the watch parameter by name in the active group.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::ConfigurationParameter* NXOpen::Motion::MechatronicsBuilder::GetConfigurationParameter | ( | const char * | inputName | ) |
Searches for the watch parameter by name in the active group.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::InputPortAssociation* NXOpen::Motion::MechatronicsBuilder::GetInput | ( | const NXString & | inputName | ) |
Retrieves an input port association from its name.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::InputPortAssociation* NXOpen::Motion::MechatronicsBuilder::GetInput | ( | const char * | inputName | ) |
Retrieves an input port association from its name.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::OutputPortAssociation* NXOpen::Motion::MechatronicsBuilder::GetOutput | ( | const NXString & | inputName | ) |
Retrieves an output port association from its name.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::OutputPortAssociation* NXOpen::Motion::MechatronicsBuilder::GetOutput | ( | const char * | inputName | ) |
Retrieves an output port association from its name.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| std::vector<NXString> NXOpen::Motion::MechatronicsBuilder::GetParameterGroupNames | ( | ) |
Allows retrieving the list of names of available configuration parameter groups.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::PortVariable* NXOpen::Motion::MechatronicsBuilder::GetPortVariable | ( | const NXString & | inputName | ) |
Searches for the watch variable by name in the active group.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| NXOpen::Motion::PortVariable* NXOpen::Motion::MechatronicsBuilder::GetPortVariable | ( | const char * | inputName | ) |
Searches for the watch variable by name in the active group.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
inputName inputname
| std::vector<NXString> NXOpen::Motion::MechatronicsBuilder::GetPortVariableGroupNames | ( | ) |
Allows retrieving the list of names of available port variables groups.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXString NXOpen::Motion::MechatronicsBuilder::HeaderFile | ( | ) |
Returns the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs)
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::InputPortAssociationList* NXOpen::Motion::MechatronicsBuilder::InputPortsList | ( | ) |
Returns the input ports list
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::MechatronicsBuilder::SolverIntegrationType NXOpen::Motion::MechatronicsBuilder::IntegrationType | ( | ) |
Returns the integration type - possible values are CoSimulation, ModelExchange
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType NXOpen::Motion::MechatronicsBuilder::MechatronicsType | ( | ) |
Returns the mechatronics type - possible values are Matlab or Amesim
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXString NXOpen::Motion::MechatronicsBuilder::ModelFile | ( | ) |
Returns the model file - a file path to a MATLAB generated DLL or to an Amesim ame file
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXString NXOpen::Motion::MechatronicsBuilder::Name | ( | ) |
Returns the name of the element
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::InputPortAssociation* NXOpen::Motion::MechatronicsBuilder::NewInputListItem | ( | ) |
Creates a new input list item including expressions.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::OutputPortAssociation* NXOpen::Motion::MechatronicsBuilder::NewOutputListItem | ( | ) |
Creates a new output list item including expressions.
- Returns
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::OutputPortAssociationList* NXOpen::Motion::MechatronicsBuilder::OutputPortsList | ( | ) |
Returns the output ports list
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::PortVariableList* NXOpen::Motion::MechatronicsBuilder::PortVariablesList | ( | ) |
Returns the watch variables list
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| NXOpen::Motion::MechatronicsBuilder::PurposeType NXOpen::Motion::MechatronicsBuilder::Purpose | ( | ) |
Returns the purpose of the mechatronics element - possible values are Import, Export
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::MechatronicsBuilder::ReadInterfaceFromFile | ( | const NXString & | filePath | ) |
Reads the input/output definition of a mechatronics element from an external file, when purpose is specified as Export.
Allowed file types are .txt, .csv, and Excel files
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filePath filepath
| void NXOpen::Motion::MechatronicsBuilder::ReadInterfaceFromFile | ( | const char * | filePath | ) |
Reads the input/output definition of a mechatronics element from an external file, when purpose is specified as Export.
Allowed file types are .txt, .csv, and Excel files
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filePath filepath
| void NXOpen::Motion::MechatronicsBuilder::RefreshLists | ( | ) |
Updates the list of available inputs and outputs (for both MATLAB ans Amesim models) and Configuration Parametersa and port Variables (for Amesim only) from the selected HeaderFile/ModelFile
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::MechatronicsBuilder::SetActiveParameterGroupName | ( | const NXString & | name | ) |
Sets the active configuration parameters group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetActiveParameterGroupName | ( | const char * | name | ) |
Sets the active configuration parameters group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetActivePortVariableGroupName | ( | const NXString & | name | ) |
Sets the active port variable group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetActivePortVariableGroupName | ( | const char * | name | ) |
Sets the active port variable group name
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetCommunicationInterval | ( | NXOpen::Expression * | communicationInterval | ) |
Sets the communication interval
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
communicationInterval communicationinterval
| void NXOpen::Motion::MechatronicsBuilder::SetCommunicationIntervalType | ( | NXOpen::Motion::MechatronicsBuilder::SolverCommunicationIntervalType | communicationIntervalType | ) |
Sets the communication interval type - possible values are Constant, Variable
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
communicationIntervalType communicationintervaltype
| void NXOpen::Motion::MechatronicsBuilder::SetHeaderFile | ( | const NXString & | filename | ) |
Sets the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs)
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filename filename
| void NXOpen::Motion::MechatronicsBuilder::SetHeaderFile | ( | const char * | filename | ) |
Sets the header file - matlab speciffic header file, that contains the definition of the interface (inputs, outputs)
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filename filename
| void NXOpen::Motion::MechatronicsBuilder::SetIntegrationType | ( | NXOpen::Motion::MechatronicsBuilder::SolverIntegrationType | integrationType | ) |
Sets the integration type - possible values are CoSimulation, ModelExchange
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
integrationType integrationtype
| void NXOpen::Motion::MechatronicsBuilder::SetMechatronicsType | ( | NXOpen::Motion::MechatronicsBuilder::MechatronicsModelType | mechatronicsType | ) |
Sets the mechatronics type - possible values are Matlab or Amesim
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
mechatronicsType mechatronicstype
| void NXOpen::Motion::MechatronicsBuilder::SetModelFile | ( | const NXString & | filename | ) |
Sets the model file - a file path to a MATLAB generated DLL or to an Amesim ame file
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filename filename
| void NXOpen::Motion::MechatronicsBuilder::SetModelFile | ( | const char * | filename | ) |
Sets the model file - a file path to a MATLAB generated DLL or to an Amesim ame file
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
filename filename
| void NXOpen::Motion::MechatronicsBuilder::SetName | ( | const NXString & | name | ) |
Sets the name of the element
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetName | ( | const char * | name | ) |
Sets the name of the element
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
name name
| void NXOpen::Motion::MechatronicsBuilder::SetPurpose | ( | NXOpen::Motion::MechatronicsBuilder::PurposeType | purpose | ) |
Sets the purpose of the mechatronics element - possible values are Import, Export
Created in NX11.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
purpose purpose
The documentation for this class was generated from the following file:
- Motion_MechatronicsBuilder.hxx