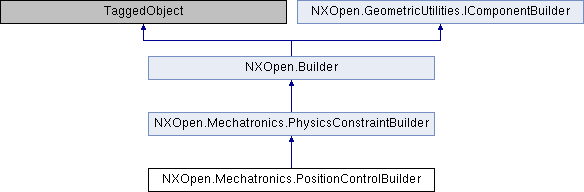
Represents a NXOpen.Mechatronics.PositionControlBuilder . More...
Public Types | |
| enum | Axis { Angular, Linear, Mixed } |
| the axis types. More... | |
| enum | AngularPathOptions { FollowShortestPath, RotateClockwise, RotateCounterclockwise, TrackMultipleTurns } |
| the angular path options. More... | |
Public Member Functions | |
| unsafe void | SetAxisJoint (NXOpen.NXObject axisJoint) |
| Sets the joint. More... | |
Properties | |
| unsafe NXOpen.Mechatronics.PositionControlBuilder.AngularPathOptions | AngularPath [get, set] |
| Returns or sets the angular path. More... | |
| unsafe NXOpen.Mechatronics.SelectPhysicsJoint | AxisJoint [get] |
| Returns the joint select. More... | |
| unsafe NXOpen.Mechatronics.PositionControlBuilder.Axis | AxisType [get, set] |
| Returns or sets the axis type. More... | |
| unsafe NXOpen.Expression | Destination [get] |
| Returns the destination. More... | |
| unsafe NXOpen.Mechatronics.SpeedPositionControlDirectiontype | DirectionType [get, set] |
| Returns or sets the direction type, which works only when the position control is used to drive NXOpen.Mechatronics.TransportSurface More... | |
| unsafe bool | EnableLimitForce [get, set] |
| Returns or sets whether or not to enable the limit force. More... | |
| unsafe NXOpen.Expression | ForwardForce [get] |
| Returns the max force that speed control can apply. More... | |
| unsafe bool | LimitJerk [get, set] |
| Returns or sets the limit jerk flag, which is used to control if the position control includes jerk data. More... | |
| unsafe NXOpen.Expression | MaxAcceleration [get] |
| Returns the max acceleration, which is used to set the maximum acceleration for position control. More... | |
| unsafe NXOpen.Expression | MaxDeceleration [get] |
| Returns the max deceleration, which is used to set the maximum deceleration for position control. More... | |
| unsafe NXOpen.Expression | MaxJerk [get] |
| Returns the max jerk, which is used to set the maximum jerk for position control. More... | |
| unsafe NXOpen.Expression | ReverseForce [get] |
| Returns the min force that speed control can apply. More... | |
| unsafe NXOpen.SelectNXObject | Signal [get] |
| Returns the signal select. More... | |
| unsafe NXOpen.Expression | Speed [get] |
| Returns the speed. More... | |
| unsafe bool | UseAcceleration [get, set] |
| Returns or sets the use acceleration flag, which is used to control if the position control includes acceleration data. More... | |
 Properties inherited from NXOpen.Mechatronics.PhysicsConstraintBuilder Properties inherited from NXOpen.Mechatronics.PhysicsConstraintBuilder | |
| unsafe string | Name [get, set] |
| Returns or sets the name. More... | |
Detailed Description
Represents a NXOpen.Mechatronics.PositionControlBuilder .
To create a new instance of this class, use NXOpen.Mechatronics.PositionControlCollection.CreatePositionControlBuilder
Created in NX7.5.1
Member Enumeration Documentation
Member Function Documentation
| unsafe void NXOpen.Mechatronics.PositionControlBuilder.SetAxisJoint | ( | NXOpen.NXObject | axisJoint | ) |
Sets the joint.
Created in NX7.5.1
License requirements: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
axisJoint
Property Documentation
|
getset |
Returns or sets the angular path.
Created in NX8.0.0
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
get |
Returns the joint select.
This can be a NXOpen.Mechatronics.HingeJoint , NXOpen.Mechatronics.SlidingJoint , NXOpen.Mechatronics.CylindricalJoint and NXOpen.Mechatronics.TransportSurface .
Created in NX7.5.1
License requirements: None.
|
getset |
Returns or sets the axis type.
Created in NX7.5.1
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
get |
Returns the destination.
Created in NX7.5.1
License requirements: None.
|
getset |
Returns or sets the direction type, which works only when the position control is used to drive NXOpen.Mechatronics.TransportSurface
Created in NX10.0.0
License requirements to get this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
getset |
Returns or sets whether or not to enable the limit force.
Created in NX9.0.0
License requirements to get this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
get |
Returns the max force that speed control can apply.
Created in NX9.0.0
License requirements: None.
|
getset |
Returns or sets the limit jerk flag, which is used to control if the position control includes jerk data.
Created in NX9.0.0
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
get |
Returns the max acceleration, which is used to set the maximum acceleration for position control.
Created in NX9.0.0
License requirements: None.
|
get |
Returns the max deceleration, which is used to set the maximum deceleration for position control.
Created in NX9.0.0
License requirements: None.
|
get |
Returns the max jerk, which is used to set the maximum jerk for position control.
Created in NX9.0.0
License requirements: None.
|
get |
Returns the min force that speed control can apply.
Created in NX9.0.0
License requirements: None.
|
get |
Returns the signal select.
This can be a NXOpen.Mechatronics.Signal or NXOpen.Mechatronics.AdapterSignal .
Created in NX12.0.0
License requirements: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
|
get |
Returns the speed.
Created in NX7.5.1
License requirements: None.
|
getset |
Returns or sets the use acceleration flag, which is used to control if the position control includes acceleration data.
Created in NX9.0.0
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
The documentation for this class was generated from the following file:
- dotnet_pool/Mechatronics_PositionControlBuilder.cs