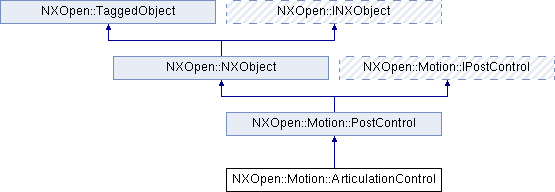
Represents the NXOpen::Motion::ArticulationControl
An instance of this class can not be obtained
Created in NX9.0.0.
More...
Public Member Functions | |
| NXOpen::Motion::ActiveView | ActiveView () |
| Returns the active view Created in NX9.0.0. More... | |
| void | ArticulationSolve (int numSteps, const std::vector< NXOpen::Motion::Joint * > &jointTags, const std::vector< double > &stepSize, const std::vector< NXOpen::Unit * > &stepSizeUnit) |
| Articulation solve with joint driver step size and number of step as input This method adds event loop that solves step by step and return. More... | |
| void | ArticulationSolve (const std::vector< NXOpen::Motion::Joint * > &jointTags, const std::vector< double > &displacement, const std::vector< NXOpen::Unit * > &displacementUnit) |
| Articulation solve with joint driver displacement as input Created in NX9.0.0. More... | |
| int | Delay () |
| Returns the articulation delay Created in NX9.0.0. More... | |
| void | Finish () |
| Articulation finish Created in NX9.0.0. More... | |
| void | GetArticulationJoints (std::vector< NXOpen::Motion::Joint * > &jointTags) |
| Articulation joints Created in NX9.0.0. More... | |
| void | GetArticulationJointsDisplacement (NXOpen::Motion::Joint *jointTag, int *currentStep, double *displacement, NXOpen::Unit **displacementUnit) |
| Get the articulation joints displacement Created in NX9.0.0. More... | |
| bool | JointsLimits () |
| Returns the articulation joint limits setting Created in NX9.0.0. More... | |
| void | SetActiveView (NXOpen::Motion::ActiveView activeView) |
| Sets the active view Created in NX9.0.0. More... | |
| void | SetDelay (int delay) |
| Sets the articulation delay Created in NX9.0.0. More... | |
| void | SetJointsLimits (bool jointLimits) |
| Sets the articulation joint limits setting Created in NX9.0.0. More... | |
| void | StepToAssemblyPosition () |
| Articulation to assembly position Created in NX9.0.0. More... | |
| void | StepToDesignPosition () |
| Articulation to design position Created in NX9.0.0. More... | |
| void | Stop () |
| Articulation stop Created in NX9.0.0. More... | |
Additional Inherited Members | |
 Public Types inherited from NXOpen::NXObject Public Types inherited from NXOpen::NXObject | |
| enum | AttributeType { AttributeTypeInvalid, AttributeTypeNull, AttributeTypeBoolean, AttributeTypeInteger, AttributeTypeReal, AttributeTypeString, AttributeTypeTime, AttributeTypeReference, AttributeTypeAny = 100 } |
| Specifies attribute type. More... | |
| enum | DateAndTimeFormat { DateAndTimeFormatNumeric, DateAndTimeFormatTextual } |
| Specifies the format of the date and time attribute. More... | |
Detailed Description
Represents the NXOpen::Motion::ArticulationControl
An instance of this class can not be obtained
Created in NX9.0.0.
Member Function Documentation
| NXOpen::Motion::ActiveView NXOpen::Motion::ArticulationControl::ActiveView | ( | ) |
Returns the active view
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::ArticulationSolve | ( | int | numSteps, |
| const std::vector< NXOpen::Motion::Joint * > & | jointTags, | ||
| const std::vector< double > & | stepSize, | ||
| const std::vector< NXOpen::Unit * > & | stepSizeUnit | ||
| ) |
Articulation solve with joint driver step size and number of step as input This method adds event loop that solves step by step and return.
It does not wait finishing the solving process. For the case there is no UI button to control the solve and stop action, call another Motion::ArticulationControl::ArticulationSolve that has no numSteps input in a cycle to solve
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
numSteps The number of step will take in one action jointTags Articulation joint tags stepSize Articulation joint step size stepSizeUnit Articulation joint step size unit
| void NXOpen::Motion::ArticulationControl::ArticulationSolve | ( | const std::vector< NXOpen::Motion::Joint * > & | jointTags, |
| const std::vector< double > & | displacement, | ||
| const std::vector< NXOpen::Unit * > & | displacementUnit | ||
| ) |
Articulation solve with joint driver displacement as input
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
jointTags Articulation joint tags displacement Articulation joint displacement displacementUnit Articulation joint displacement units
| int NXOpen::Motion::ArticulationControl::Delay | ( | ) |
Returns the articulation delay
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::Finish | ( | ) |
Articulation finish
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::GetArticulationJoints | ( | std::vector< NXOpen::Motion::Joint * > & | jointTags | ) |
Articulation joints
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
jointTags The articulation joint array
| void NXOpen::Motion::ArticulationControl::GetArticulationJointsDisplacement | ( | NXOpen::Motion::Joint * | jointTag, |
| int * | currentStep, | ||
| double * | displacement, | ||
| NXOpen::Unit ** | displacementUnit | ||
| ) |
Get the articulation joints displacement
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
jointTag The special articulation joint object currentStep The current step index displacement The articulation joint displacement value within current step displacementUnit The articulation joint displacement unit
| bool NXOpen::Motion::ArticulationControl::JointsLimits | ( | ) |
Returns the articulation joint limits setting
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::SetActiveView | ( | NXOpen::Motion::ActiveView | activeView | ) |
Sets the active view
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
activeView activeview
| void NXOpen::Motion::ArticulationControl::SetDelay | ( | int | delay | ) |
Sets the articulation delay
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
delay delay
| void NXOpen::Motion::ArticulationControl::SetJointsLimits | ( | bool | jointLimits | ) |
Sets the articulation joint limits setting
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
- Parameters
-
jointLimits jointlimits
| void NXOpen::Motion::ArticulationControl::StepToAssemblyPosition | ( | ) |
Articulation to assembly position
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::StepToDesignPosition | ( | ) |
Articulation to design position
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
| void NXOpen::Motion::ArticulationControl::Stop | ( | ) |
Articulation stop
Created in NX9.0.0.
License requirements : mechanisms ("MECHANISMS")
The documentation for this class was generated from the following file:
- Motion_ArticulationControl.hxx