Represents the builder class to create or edit a NXOpen::Mechatronics::ThreeJointCoupler object. More...
Public Types | |
| enum | AxisJointType { AxisJointTypeLinear, AxisJointTypeAngular } |
| the axis joint types. More... | |
Public Member Functions | |
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | AxisType () |
| Returns the axis joint type. More... | |
| NXOpen::Expression * | ExpressionMasterMultiple () |
| Returns the master multiple expression. More... | |
| NXOpen::Expression * | ExpressionSlaveMultiple () |
| Returns the slave multiple expression. More... | |
| NXOpen::Expression * | ExpressionThirdJointMultiple () |
| Returns the third joint multiple expression. More... | |
| void | SetAxisType (NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType axisType) |
| Sets the axis joint type. More... | |
| void | SetSlaveAxisType (NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType slaveAxisType) |
| Sets the axis joint type. More... | |
| void | SetThirdJointAxisType (NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType thirdAxisType) |
| Sets the axis joint type. More... | |
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | SlaveAxisType () |
| Returns the axis joint type. More... | |
| NXOpen::Mechatronics::SelectPhysicsJoint * | ThirdAxisJoint () |
| Returns the third axis joint. More... | |
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | ThirdJointAxisType () |
| Returns the axis joint type. More... | |
 Public Member Functions inherited from NXOpen::Mechatronics::CouplingBuilder Public Member Functions inherited from NXOpen::Mechatronics::CouplingBuilder | |
| bool | AllowSlip () |
| Returns the coulping can slip or not. More... | |
| NXOpen::Mechatronics::SelectPhysicsJoint * | MasterAxisJoint () |
| Returns the master axis joint. More... | |
| void | SetAllowSlip (bool allowSlip) |
| Sets the coulping can slip or not. More... | |
| void | SetMasterAxisJoint (NXOpen::Mechatronics::PhysicsJoint *master) |
| Sets the master axis. More... | |
| void | SetSlaveAxisJoint (NXOpen::Mechatronics::PhysicsJoint *slave) |
| Sets the slave axis. More... | |
| NXOpen::Mechatronics::SelectPhysicsJoint * | SlaveAxisJoint () |
| Returns the slave axis joint. More... | |
| Public Member Functions inherited from NXOpen::Mechatronics::PhysicsConstraintBuilder | |
| NXString | Name () |
| Returns the name. More... | |
| void | SetName (const NXString &name) |
| Sets the name. More... | |
| void | SetName (const char *name) |
| Sets the name. More... | |
| Public Member Functions inherited from NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| NXOpen::NXObject * | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| virtual bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen::TaggedObject | |
| tag_t | Tag () const |
| Returns the tag of this object. More... | |
Detailed Description
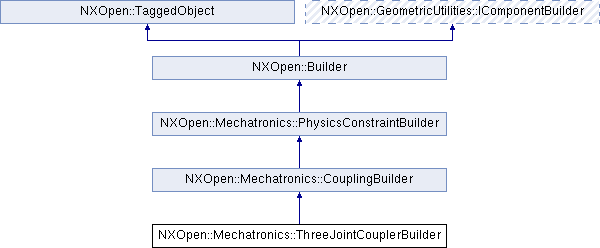
Represents the builder class to create or edit a NXOpen::Mechatronics::ThreeJointCoupler object.
To create a new instance of this class, use NXOpen::Mechatronics::ThreeJointCouplerCollection::CreateThreeJointCouplerBuilder
Created in NX12.0.0.
Member Enumeration Documentation
Member Function Documentation
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisType | ( | ) |
Returns the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::ThreeJointCouplerBuilder::ExpressionMasterMultiple | ( | ) |
Returns the master multiple expression.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::ThreeJointCouplerBuilder::ExpressionSlaveMultiple | ( | ) |
Returns the slave multiple expression.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::ThreeJointCouplerBuilder::ExpressionThirdJointMultiple | ( | ) |
Returns the third joint multiple expression.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| void NXOpen::Mechatronics::ThreeJointCouplerBuilder::SetAxisType | ( | NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | axisType | ) |
Sets the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
axisType axistype
| void NXOpen::Mechatronics::ThreeJointCouplerBuilder::SetSlaveAxisType | ( | NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | slaveAxisType | ) |
Sets the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
slaveAxisType slaveaxistype
| void NXOpen::Mechatronics::ThreeJointCouplerBuilder::SetThirdJointAxisType | ( | NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType | thirdAxisType | ) |
Sets the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
thirdAxisType thirdaxistype
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType NXOpen::Mechatronics::ThreeJointCouplerBuilder::SlaveAxisType | ( | ) |
Returns the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Mechatronics::SelectPhysicsJoint* NXOpen::Mechatronics::ThreeJointCouplerBuilder::ThirdAxisJoint | ( | ) |
Returns the third axis joint.
This can be a NXOpen::Mechatronics::HingeJoint , NXOpen::Mechatronics::SlidingJoint and NXOpen::Mechatronics::CylindricalJoint .
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Mechatronics::ThreeJointCouplerBuilder::AxisJointType NXOpen::Mechatronics::ThreeJointCouplerBuilder::ThirdJointAxisType | ( | ) |
Returns the axis joint type.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
The documentation for this class was generated from the following file:
- Mechatronics_ThreeJointCouplerBuilder.hxx