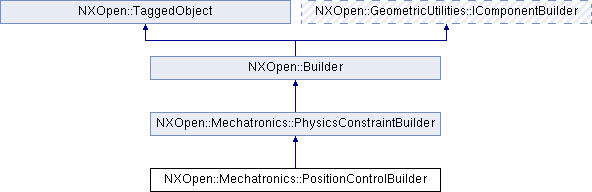
Represents a NXOpen::Mechatronics::PositionControlBuilder . More...
Public Types | |
| enum | AngularPathOptions { AngularPathOptionsFollowShortestPath, AngularPathOptionsRotateClockwise, AngularPathOptionsRotateCounterclockwise, AngularPathOptionsTrackMultipleTurns } |
| the angular path options. More... | |
| enum | Axis { AxisAngular, AxisLinear, AxisMixed } |
| the axis types. More... | |
Public Member Functions | |
| NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions | AngularPath () |
| Returns the angular path. More... | |
| NXOpen::Mechatronics::SelectPhysicsJoint * | AxisJoint () |
| Returns the joint select. More... | |
| NXOpen::Mechatronics::PositionControlBuilder::Axis | AxisType () |
| Returns the axis type. More... | |
| NXOpen::Expression * | Destination () |
| Returns the destination. More... | |
| NXOpen::Mechatronics::SpeedPositionControlDirectiontype | DirectionType () |
| Returns the direction type, which works only when the position control is used to drive NXOpen::Mechatronics::TransportSurface Created in NX10.0.0. More... | |
| bool | EnableLimitForce () |
| Returns whether or not to enable the limit force. More... | |
| NXOpen::Expression * | ForwardForce () |
| Returns the max force that speed control can apply. More... | |
| bool | LimitJerk () |
| Returns the limit jerk flag, which is used to control if the position control includes jerk data. More... | |
| NXOpen::Expression * | MaxAcceleration () |
| Returns the max acceleration, which is used to set the maximum acceleration for position control. More... | |
| NXOpen::Expression * | MaxDeceleration () |
| Returns the max deceleration, which is used to set the maximum deceleration for position control. More... | |
| NXOpen::Expression * | MaxJerk () |
| Returns the max jerk, which is used to set the maximum jerk for position control. More... | |
| NXOpen::Expression * | ReverseForce () |
| Returns the min force that speed control can apply. More... | |
| void | SetAngularPath (NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions angularPath) |
| Sets the angular path. More... | |
| void | SetAxisJoint (NXOpen::NXObject *axisJoint) |
| Sets the joint. More... | |
| void | SetAxisType (NXOpen::Mechatronics::PositionControlBuilder::Axis axisType) |
| Sets the axis type. More... | |
| void | SetDirectionType (NXOpen::Mechatronics::SpeedPositionControlDirectiontype directionType) |
| Sets the direction type, which works only when the position control is used to drive NXOpen::Mechatronics::TransportSurface Created in NX10.0.0. More... | |
| void | SetEnableLimitForce (bool enable) |
| Sets whether or not to enable the limit force. More... | |
| void | SetLimitJerk (bool limitJerk) |
| Sets the limit jerk flag, which is used to control if the position control includes jerk data. More... | |
| void | SetUseAcceleration (bool useAcceleration) |
| Sets the use acceleration flag, which is used to control if the position control includes acceleration data. More... | |
| NXOpen::SelectNXObject * | Signal () |
| Returns the signal select. More... | |
| NXOpen::Expression * | Speed () |
| Returns the speed. More... | |
| bool | UseAcceleration () |
| Returns the use acceleration flag, which is used to control if the position control includes acceleration data. More... | |
 Public Member Functions inherited from NXOpen::Mechatronics::PhysicsConstraintBuilder Public Member Functions inherited from NXOpen::Mechatronics::PhysicsConstraintBuilder | |
| NXString | Name () |
| Returns the name. More... | |
| void | SetName (const NXString &name) |
| Sets the name. More... | |
| void | SetName (const char *name) |
| Sets the name. More... | |
| Public Member Functions inherited from NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| NXOpen::NXObject * | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| virtual bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen::TaggedObject | |
| tag_t | Tag () const |
| Returns the tag of this object. More... | |
Detailed Description
Represents a NXOpen::Mechatronics::PositionControlBuilder .
To create a new instance of this class, use NXOpen::Mechatronics::PositionControlCollection::CreatePositionControlBuilder
Created in NX7.5.1.
Member Enumeration Documentation
Member Function Documentation
| NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions NXOpen::Mechatronics::PositionControlBuilder::AngularPath | ( | ) |
Returns the angular path.
Created in NX8.0.0.
License requirements : None
| NXOpen::Mechatronics::SelectPhysicsJoint* NXOpen::Mechatronics::PositionControlBuilder::AxisJoint | ( | ) |
Returns the joint select.
This can be a NXOpen::Mechatronics::HingeJoint , NXOpen::Mechatronics::SlidingJoint , NXOpen::Mechatronics::CylindricalJoint and NXOpen::Mechatronics::TransportSurface .
Created in NX7.5.1.
License requirements : None
| NXOpen::Mechatronics::PositionControlBuilder::Axis NXOpen::Mechatronics::PositionControlBuilder::AxisType | ( | ) |
Returns the axis type.
Created in NX7.5.1.
License requirements : None
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::Destination | ( | ) |
Returns the destination.
Created in NX7.5.1.
License requirements : None
| NXOpen::Mechatronics::SpeedPositionControlDirectiontype NXOpen::Mechatronics::PositionControlBuilder::DirectionType | ( | ) |
Returns the direction type, which works only when the position control is used to drive NXOpen::Mechatronics::TransportSurface
Created in NX10.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| bool NXOpen::Mechatronics::PositionControlBuilder::EnableLimitForce | ( | ) |
Returns whether or not to enable the limit force.
Created in NX9.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::ForwardForce | ( | ) |
Returns the max force that speed control can apply.
Created in NX9.0.0.
License requirements : None
| bool NXOpen::Mechatronics::PositionControlBuilder::LimitJerk | ( | ) |
Returns the limit jerk flag, which is used to control if the position control includes jerk data.
Created in NX9.0.0.
License requirements : None
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::MaxAcceleration | ( | ) |
Returns the max acceleration, which is used to set the maximum acceleration for position control.
Created in NX9.0.0.
License requirements : None
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::MaxDeceleration | ( | ) |
Returns the max deceleration, which is used to set the maximum deceleration for position control.
Created in NX9.0.0.
License requirements : None
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::MaxJerk | ( | ) |
Returns the max jerk, which is used to set the maximum jerk for position control.
Created in NX9.0.0.
License requirements : None
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::ReverseForce | ( | ) |
Returns the min force that speed control can apply.
Created in NX9.0.0.
License requirements : None
| void NXOpen::Mechatronics::PositionControlBuilder::SetAngularPath | ( | NXOpen::Mechatronics::PositionControlBuilder::AngularPathOptions | angularPath | ) |
Sets the angular path.
Created in NX8.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
angularPath angularpath
| void NXOpen::Mechatronics::PositionControlBuilder::SetAxisJoint | ( | NXOpen::NXObject * | axisJoint | ) |
Sets the joint.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
axisJoint axis joint
| void NXOpen::Mechatronics::PositionControlBuilder::SetAxisType | ( | NXOpen::Mechatronics::PositionControlBuilder::Axis | axisType | ) |
Sets the axis type.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
axisType axistype
| void NXOpen::Mechatronics::PositionControlBuilder::SetDirectionType | ( | NXOpen::Mechatronics::SpeedPositionControlDirectiontype | directionType | ) |
Sets the direction type, which works only when the position control is used to drive NXOpen::Mechatronics::TransportSurface
Created in NX10.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
directionType directiontype
| void NXOpen::Mechatronics::PositionControlBuilder::SetEnableLimitForce | ( | bool | enable | ) |
Sets whether or not to enable the limit force.
Created in NX9.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
enable enable
| void NXOpen::Mechatronics::PositionControlBuilder::SetLimitJerk | ( | bool | limitJerk | ) |
Sets the limit jerk flag, which is used to control if the position control includes jerk data.
Created in NX9.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
limitJerk limitjerk
| void NXOpen::Mechatronics::PositionControlBuilder::SetUseAcceleration | ( | bool | useAcceleration | ) |
Sets the use acceleration flag, which is used to control if the position control includes acceleration data.
Created in NX9.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
useAcceleration useacceleration
| NXOpen::SelectNXObject* NXOpen::Mechatronics::PositionControlBuilder::Signal | ( | ) |
Returns the signal select.
This can be a NXOpen::Mechatronics::Signal or NXOpen::Mechatronics::AdapterSignal .
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::PositionControlBuilder::Speed | ( | ) |
Returns the speed.
Created in NX7.5.1.
License requirements : None
| bool NXOpen::Mechatronics::PositionControlBuilder::UseAcceleration | ( | ) |
Returns the use acceleration flag, which is used to control if the position control includes acceleration data.
Created in NX9.0.0.
License requirements : None
The documentation for this class was generated from the following file:
- Mechatronics_PositionControlBuilder.hxx