Represents a NXOpen::Mechatronics::CollisionSensor builder. More...
Public Types | |
| enum | CollisionShapeTypes { CollisionShapeTypesBox, CollisionShapeTypesSphere, CollisionShapeTypesLine } |
| the Trigger Shape Types. More... | |
| enum | ShapePropertiesOption { ShapePropertiesOptionAutomatic, ShapePropertiesOptionUserDefined } |
| the Trigger Shape Option. More... | |
Public Member Functions | |
| int | Category () |
| Returns the category. More... | |
| NXOpen::Mechatronics::CollisionSensorBuilder::CollisionShapeTypes | CollisionShape () |
| Returns the collision shape type. More... | |
| NXOpen::SelectNXObjectList * | Geometry () |
| Returns the geometries. More... | |
| bool | HighlightOnCollision () |
| Returns the option of highlight on collision. More... | |
| NXString | Name () |
| Returns the name. More... | |
| void | SetCategory (int category) |
| Sets the category. More... | |
| void | SetCollisionShape (NXOpen::Mechatronics::CollisionSensorBuilder::CollisionShapeTypes collisionShape) |
| Sets the collision shape type. More... | |
| void | SetGeometry (const std::vector< NXOpen::NXObject * > &geometries) |
| Sets the geometries. More... | |
| void | SetHighlightOnCollision (bool highlight) |
| Sets the option of highlight on collision. More... | |
| void | SetName (const NXString &name) |
| Sets the name. More... | |
| void | SetName (const char *name) |
| Sets the name. More... | |
| void | SetShapeProperties (NXOpen::Mechatronics::CollisionSensorBuilder::ShapePropertiesOption shapeProperties) |
| Sets the trigger shape option. More... | |
| NXOpen::Mechatronics::CollisionSensorBuilder::ShapePropertiesOption | ShapeProperties () |
| Returns the trigger shape option. More... | |
 Public Member Functions inherited from NXOpen::Mechatronics::CollisionShapeBuilder Public Member Functions inherited from NXOpen::Mechatronics::CollisionShapeBuilder | |
| NXOpen::Point * | CenterPoint () |
| Returns the center point. More... | |
| NXOpen::Expression * | Height () |
| Returns the height. More... | |
| NXOpen::Expression * | Length () |
| Returns the length. More... | |
| NXOpen::CoordinateSystem * | Orientation () |
| Returns the orientation. More... | |
| NXOpen::Expression * | Radius () |
| Returns the radius. More... | |
| void | SetCenterPoint (NXOpen::Point *centerPoint) |
| Sets the center point. More... | |
| void | SetOrientation (NXOpen::CoordinateSystem *orientation) |
| Sets the orientation. More... | |
| NXOpen::Expression * | Width () |
| Returns the width. More... | |
| Public Member Functions inherited from NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| NXOpen::NXObject * | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| virtual bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen::TaggedObject | |
| tag_t | Tag () const |
| Returns the tag of this object. More... | |
Detailed Description
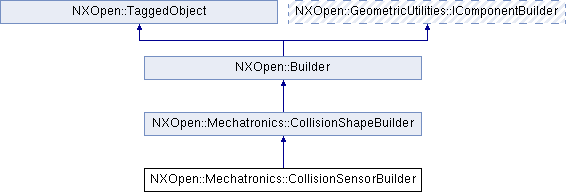
Represents a NXOpen::Mechatronics::CollisionSensor builder.
To create a new instance of this class, use NXOpen::Mechatronics::CollisionSensorCollection::CreateCollisionSensorBuilder
Created in NX7.5.1.
Member Enumeration Documentation
Member Function Documentation
| int NXOpen::Mechatronics::CollisionSensorBuilder::Category | ( | ) |
Returns the category.
It should be between 0 and 16.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Mechatronics::CollisionSensorBuilder::CollisionShapeTypes NXOpen::Mechatronics::CollisionSensorBuilder::CollisionShape | ( | ) |
Returns the collision shape type.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::SelectNXObjectList* NXOpen::Mechatronics::CollisionSensorBuilder::Geometry | ( | ) |
Returns the geometries.
This can be a NXOpen::Assemblies::ComponentAssembly , NXOpen::Point , bodies and curves.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| bool NXOpen::Mechatronics::CollisionSensorBuilder::HighlightOnCollision | ( | ) |
Returns the option of highlight on collision.
If the highlight is true, then the sensor will be highlighted when it is collided or triggered during simulation.
Created in NX10.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXString NXOpen::Mechatronics::CollisionSensorBuilder::Name | ( | ) |
Returns the name.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetCategory | ( | int | category | ) |
Sets the category.
It should be between 0 and 16.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
category category
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetCollisionShape | ( | NXOpen::Mechatronics::CollisionSensorBuilder::CollisionShapeTypes | collisionShape | ) |
Sets the collision shape type.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
collisionShape collisionshape
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetGeometry | ( | const std::vector< NXOpen::NXObject * > & | geometries | ) |
Sets the geometries.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
geometries Input geometries
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetHighlightOnCollision | ( | bool | highlight | ) |
Sets the option of highlight on collision.
If the highlight is true, then the sensor will be highlighted when it is collided or triggered during simulation.
Created in NX10.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
highlight highlight
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetName | ( | const NXString & | name | ) |
Sets the name.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
name name
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetName | ( | const char * | name | ) |
Sets the name.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
name name
| void NXOpen::Mechatronics::CollisionSensorBuilder::SetShapeProperties | ( | NXOpen::Mechatronics::CollisionSensorBuilder::ShapePropertiesOption | shapeProperties | ) |
Sets the trigger shape option.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
shapeProperties shapeproperties
| NXOpen::Mechatronics::CollisionSensorBuilder::ShapePropertiesOption NXOpen::Mechatronics::CollisionSensorBuilder::ShapeProperties | ( | ) |
Returns the trigger shape option.
Created in NX7.5.1.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
The documentation for this class was generated from the following file:
- Mechatronics_CollisionSensorBuilder.hxx