Represents a NXOpen::Mechatronics::ChainJointBuilder . More...
Public Member Functions | |
| NXOpen::Point * | AnchorPointSecond () |
| Returns the second anchor point. More... | |
| NXOpen::Expression * | AngularLowerLimit () |
| Returns the angular lower limit. More... | |
| NXOpen::Expression * | AngularUpperLimit () |
| Returns the angular upper limit. More... | |
| NXOpen::Point * | BaseAnchorPoint () |
| Returns. More... | |
| NXOpen::Direction * | BaseAxisVector () |
| Returns. More... | |
| bool | EnableAngularLowerLimit () |
| Returns the angular lower limit option. More... | |
| bool | EnableAngularUpperLimit () |
| Returns the angular upper limit option. More... | |
| bool | EnableSecondAnchor () |
| Returns the second anchor point option. More... | |
| NXOpen::SelectNXObjectList * | Geometry () |
| Returns the geometries. More... | |
| NXString | Name () |
| Returns the name. More... | |
| void | SetAnchorPointSecond (NXOpen::Point *anchorPoint) |
| Sets the second anchor point. More... | |
| void | SetBaseAnchorPoint (NXOpen::Point *point) |
| Sets. More... | |
| void | SetBaseAxisVector (NXOpen::Direction *axisVector) |
| Sets. More... | |
| void | SetEnableAngularLowerLimit (bool enable) |
| Sets the angular lower limit option. More... | |
| void | SetEnableAngularUpperLimit (bool enable) |
| Sets the angular upper limit option. More... | |
| void | SetEnableSecondAnchor (bool enable) |
| Sets the second anchor point option. More... | |
| void | SetName (const NXString &name) |
| Sets the name. More... | |
| void | SetName (const char *name) |
| Sets the name. More... | |
| NXOpen::Expression * | StartAngle () |
| Returns the start angle. More... | |
 Public Member Functions inherited from NXOpen::Builder Public Member Functions inherited from NXOpen::Builder | |
| NXOpen::NXObject * | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| std::vector< NXOpen::NXObject * > | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| NXOpen::NXObject * | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| virtual bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen::TaggedObject | |
| tag_t | Tag () const |
| Returns the tag of this object. More... | |
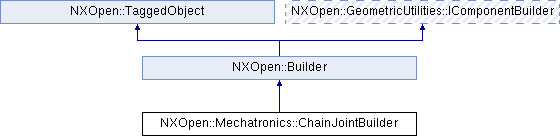
Detailed Description
Represents a NXOpen::Mechatronics::ChainJointBuilder .
When Builder::Commit is called NULL will be returned.
To create a new instance of this class, use NXOpen::Mechatronics::PhysicsManager::CreateChainJointBuilder
Created in NX12.0.0.
Member Function Documentation
| NXOpen::Point* NXOpen::Mechatronics::ChainJointBuilder::AnchorPointSecond | ( | ) |
Returns the second anchor point.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::ChainJointBuilder::AngularLowerLimit | ( | ) |
Returns the angular lower limit.
The lower limit setup for joint angular movement.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Expression* NXOpen::Mechatronics::ChainJointBuilder::AngularUpperLimit | ( | ) |
Returns the angular upper limit.
The upper limit setup for joint angular movement.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Point* NXOpen::Mechatronics::ChainJointBuilder::BaseAnchorPoint | ( | ) |
Returns.
the anchor point.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::Direction* NXOpen::Mechatronics::ChainJointBuilder::BaseAxisVector | ( | ) |
Returns.
the axis vector.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| bool NXOpen::Mechatronics::ChainJointBuilder::EnableAngularLowerLimit | ( | ) |
Returns the angular lower limit option.
If the enable is true, then this joint will be applied the lower limit in angular direction.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| bool NXOpen::Mechatronics::ChainJointBuilder::EnableAngularUpperLimit | ( | ) |
Returns the angular upper limit option.
If the enable is true, then this joint will be applied the upper limit in angular direction.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| bool NXOpen::Mechatronics::ChainJointBuilder::EnableSecondAnchor | ( | ) |
Returns the second anchor point option.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXOpen::SelectNXObjectList* NXOpen::Mechatronics::ChainJointBuilder::Geometry | ( | ) |
Returns the geometries.
This can be a NXOpen::Assemblies::ComponentAssembly or NXOpen::Mechatronics::RigidBody
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| NXString NXOpen::Mechatronics::ChainJointBuilder::Name | ( | ) |
Returns the name.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
| void NXOpen::Mechatronics::ChainJointBuilder::SetAnchorPointSecond | ( | NXOpen::Point * | anchorPoint | ) |
Sets the second anchor point.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
anchorPoint anchorpoint
| void NXOpen::Mechatronics::ChainJointBuilder::SetBaseAnchorPoint | ( | NXOpen::Point * | point | ) |
Sets.
the anchor point.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
point point
| void NXOpen::Mechatronics::ChainJointBuilder::SetBaseAxisVector | ( | NXOpen::Direction * | axisVector | ) |
Sets.
the axis vector.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
axisVector axisvector
| void NXOpen::Mechatronics::ChainJointBuilder::SetEnableAngularLowerLimit | ( | bool | enable | ) |
Sets the angular lower limit option.
If the enable is true, then this joint will be applied the lower limit in angular direction.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
enable enable
| void NXOpen::Mechatronics::ChainJointBuilder::SetEnableAngularUpperLimit | ( | bool | enable | ) |
Sets the angular upper limit option.
If the enable is true, then this joint will be applied the upper limit in angular direction.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
enable enable
| void NXOpen::Mechatronics::ChainJointBuilder::SetEnableSecondAnchor | ( | bool | enable | ) |
Sets the second anchor point option.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
enable enable
| void NXOpen::Mechatronics::ChainJointBuilder::SetName | ( | const NXString & | name | ) |
Sets the name.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
name name
| void NXOpen::Mechatronics::ChainJointBuilder::SetName | ( | const char * | name | ) |
Sets the name.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
- Parameters
-
name name
| NXOpen::Expression* NXOpen::Mechatronics::ChainJointBuilder::StartAngle | ( | ) |
Returns the start angle.
Created in NX12.0.0.
License requirements : nx_mcd_core ("MECHATRONICS CONCEPT DESIGNER")
The documentation for this class was generated from the following file:
- Mechatronics_ChainJointBuilder.hxx