|
NXOpen .NET Reference Guide
1899
|
|
NXOpen .NET Reference Guide
1899
|
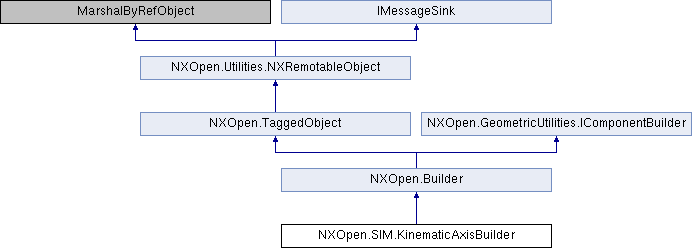
Represents the SimKimAxisBuilder class object More...
Public Types | |
| enum | AxisDirectionType { PositiveX, NegativeX, PositiveY, NegativeY, PositiveZ, NegativeZ } |
| The axis direction type More... | |
| enum | AxisMotionType { LinearNcAxis, RotaryNcAxis, Linear, Rotary, RotaryUnlimitedNcAxis, SpindleNcAxis, RotaryUnlimited, Spindle } |
| The axis motions type More... | |
Properties | |
| unsafe double | CoarsePrecision [get, set] |
| Returns or sets the coarse precision. More... | |
| unsafe NXOpen.SIM.KinematicAxisBuilder.AxisDirectionType | Direction [get, set] |
| Returns or sets the axis direction More... | |
| unsafe double | FinePrecision [get, set] |
| Returns or sets the fine precision. More... | |
| unsafe double | InitialValue [get, set] |
| Returns or sets the initial value More... | |
| unsafe double | JerkLimit [get, set] |
| Returns or sets the jerk limit. More... | |
| unsafe double | JumpVelocity [get, set] |
| Returns or sets the jump velocity. More... | |
| unsafe NXOpen.SIM.KinematicJunction | Junction [get, set] |
| Returns or sets the junction More... | |
| unsafe double | Kv [get, set] |
| Returns or sets the kv. More... | |
| unsafe bool | Limit [get, set] |
| Returns or sets the axis limits flag More... | |
| unsafe double | LowerLimit [get, set] |
| Returns or sets the lower limit More... | |
| unsafe double | LowerSoftLimit [get, set] |
| Returns or sets the lower soft limit. More... | |
| unsafe double | MaxAcceleration [get, set] |
| Returns or sets the max acceleration. More... | |
| unsafe double | MaxDeceleration [get, set] |
| Returns or sets the max deceleration. More... | |
| unsafe double | MaximumVelocity [get, set] |
| Returns or sets the maximum velocity More... | |
| unsafe string | Name [get, set] |
| Returns or sets the kinematic axis's name More... | |
| unsafe int | Number [get, set] |
| Returns or sets the kinematic axis's number. More... | |
| unsafe NXOpen.SIM.KinematicAxisBuilder.AxisMotionType | Type [get, set] |
| Returns or sets the axis motion More... | |
| unsafe double | UpperLimit [get, set] |
| Returns or sets the upper limit More... | |
| unsafe double | UpperSoftLimit [get, set] |
| Returns or sets the upper soft limit. More... | |
 Properties inherited from NXOpen.Builder Properties inherited from NXOpen.Builder | |
| unsafe NXOpen.PreviewBuilder | PreviewBuilder [get] |
| Returns the preview builder subobject. More... | |
| Properties inherited from NXOpen.TaggedObject | |
| Tag | Tag [get] |
| Returns the tag of this object. More... | |
| Properties inherited from NXOpen.Utilities.NXRemotableObject | |
| IMessageSink | NextSink [get] |
| Gets the next message sink in the sink chain. More... | |
Additional Inherited Members | |
| Public Member Functions inherited from NXOpen.Builder | |
| unsafe NXOpen.NXObject | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| unsafe void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| unsafe NXOpen.NXObject[] | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| unsafe NXOpen.NXObject | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| unsafe void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| unsafe bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Protected Member Functions inherited from NXOpen.TaggedObject | |
| new void | initialize () |
| <exclude> More... | |
Represents the SimKimAxisBuilder class object
Use the NXOpen.SIM.KinematicConfigurator class to create a KinematicAxisBuilder object.
Created in NX7.5.0
|
getset |
Returns or sets the coarse precision.
This defines the exact stop precision used to determine if a target point has been reached, so that the next NC-block can be executed.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the axis direction
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the fine precision.
This defines the exact stop precision used to determine if a target point has been reached, so that the next NC-block can be executed.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the initial value
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the jerk limit.
The jerk limit value limits jumps in acceleration.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the jump velocity.
The jump velocity define a lag time at the beginning of the motion.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the junction
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the kv.
the Kv-Factor is a parameter of the drives. It influences the dragging error (difference between ideal motion profile and actual motion profile).
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the axis limits flag
This property is deprecated. Use SIM.KinematicAxisBuilder.AxisMotionType instead.
Created in NX7.5.0
Deprecated in NX9.0.3. Use SIM.KinematicAxisBuilder.AxisMotionType instead.
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the lower limit
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the lower soft limit.
The soft limit on the real machine is checked by the controller to avoid that the machine travels into the mechanical stop (Hard Limit) with full speed (prevent damage)
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the max acceleration.
The maximum acceleration defines how fast the axis can accelerate.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the max deceleration.
The maximum deceleration defines how fast the axis can decelerate.
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the maximum velocity
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the kinematic axis's name
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the kinematic axis's number.
The axis number is used in cases where an axis is programmed through a number instead of through an address (e.g. on Siemens 840D: AX1=10 instead of X10).
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the axis motion
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the upper limit
Created in NX7.5.0
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
|
getset |
Returns or sets the upper soft limit.
The soft limit on the real machine is checked by the controller to avoid that the machine travels into the mechanical stop (Hard Limit) with full speed (prevent damage)
Created in NX9.0.3
License requirements to get this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")
License requirements to set this property: ug_isv_full ("Full functionality for Integrated Simulation and Verification") OR nx_isv_mtb ("Machine Tool Builder")

