|
NXOpen .NET Reference Guide
1899
|
|
NXOpen .NET Reference Guide
1899
|
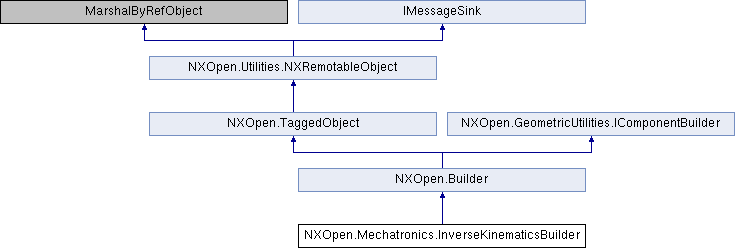
Represents a NXOpen.Mechatronics.InverseKinematics builder. More...
Public Types | |
| enum | SolverResult { Success, Approximate, Limits, ReachError, Timeout, CollidingTarget, CollidingStart, LimitError, TargetEqualsStart, Unknown } |
| Specifies the result of the inverse kinematics solver. More... | |
| enum | Types { Online, Offline } |
| the inverse kinematics types. More... | |
Public Member Functions | |
| unsafe NXOpen.CoordinateSystem | GetErrorPose () |
| Returns the pose that encounters error. More... | |
| unsafe bool | GetIsAutosolve () |
| Get the flag of auto execute IK solve. More... | |
| unsafe NXOpen.Mechatronics.InverseKinematicsBuilder.SolverResult | GetResult () |
| Returns the solver result. More... | |
| unsafe NXOpen.Matrix3x3 | GetStartOrientation () |
| Gets the start orientation. More... | |
| unsafe void | SetIsAutosolve (bool autoSolve) |
| Set the flag of auto execute IK solve. More... | |
| unsafe void | SetStartOrientation (NXOpen.Matrix3x3 startOrit) |
| Sets the start orientation. More... | |
| unsafe void | SetTracer (NXOpen.Mechatronics.Tracer tracer) |
| Set reference tracer object. More... | |
 Public Member Functions inherited from NXOpen.Builder Public Member Functions inherited from NXOpen.Builder | |
| unsafe NXOpen.NXObject | Commit () |
| Commits any edits that have been applied to the builder. More... | |
| unsafe void | Destroy () |
| Deletes the builder, and cleans up any objects created by the builder. More... | |
| unsafe NXOpen.NXObject[] | GetCommittedObjects () |
| For builders that create more than one object, this method returns the objects that are created by commit. More... | |
| unsafe NXOpen.NXObject | GetObject () |
| Returns the object currently being edited by this builder. More... | |
| unsafe void | ShowResults () |
| Updates the model to reflect the result of an edit to the model for all builders that support showing results. More... | |
| unsafe bool | Validate () |
| Validate whether the inputs to the component are sufficient for commit to be called. More... | |
| Public Member Functions inherited from NXOpen.TaggedObject | |
| void | PrintTestData (String variableName) |
| <exclude> More... | |
| void | PrintTestData (String variableName, int lineNumber) |
| <exclude> More... | |
| override string | ToString () |
| Returns a String that represents the current Object. More... | |
| Public Member Functions inherited from NXOpen.Utilities.NXRemotableObject | |
| IMessageCtrl | AsyncProcessMessage (IMessage msg, IMessageSink replySink) |
| Asynchronously processes the given message. More... | |
| IMessage | SyncProcessMessage (IMessage msg) |
| Synchronously processes the given message. More... | |
Properties | |
| unsafe bool | AvoidCollision [get, set] |
| Returns or sets the option of avoiding collision. More... | |
| unsafe NXOpen.Mechatronics.Convention | EulerAngleConvention [get, set] |
| Returns or sets the Euler angle convention. More... | |
| unsafe NXOpen.Mechatronics.FrameBuilderList | FrameList [get] |
| Returns the list containing the defined frames. More... | |
| unsafe bool | GenerateTracer [get, set] |
| Returns or sets the option of generating tracer object. More... | |
| unsafe string | Name [get, set] |
| Returns or sets the name. More... | |
| unsafe NXOpen.Mechatronics.SelectRigidBody | RigidBody [get] |
| Returns the rigid body. More... | |
| unsafe NXOpen.Point | StartPoint [get, set] |
| Returns or sets the start point. More... | |
| unsafe NXOpen.Mechatronics.InverseKinematicsBuilder.Types | Type [get, set] |
| Returns or sets the type More... | |
| Properties inherited from NXOpen.Builder | |
| unsafe NXOpen.PreviewBuilder | PreviewBuilder [get] |
| Returns the preview builder subobject. More... | |
| Properties inherited from NXOpen.TaggedObject | |
| Tag | Tag [get] |
| Returns the tag of this object. More... | |
| Properties inherited from NXOpen.Utilities.NXRemotableObject | |
| IMessageSink | NextSink [get] |
| Gets the next message sink in the sink chain. More... | |
Additional Inherited Members | |
| Protected Member Functions inherited from NXOpen.TaggedObject | |
| new void | initialize () |
| <exclude> More... | |
Represents a NXOpen.Mechatronics.InverseKinematics builder.
To create a new instance of this class, use NXOpen.Mechatronics.InverseKinematicsCollection.CreateInverseKinematicsBuilder
Created in NX1872.0.0
Specifies the result of the inverse kinematics solver.
|
inline |
Returns the pose that encounters error.
Created in NX1872.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
|
inline |
Get the flag of auto execute IK solve.
Created in NX1899.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
|
inline |
Returns the solver result.
Created in NX1872.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
|
inline |
Gets the start orientation.
Created in NX1872.0.0
License requirements: None.
|
inline |
Set the flag of auto execute IK solve.
If this flag is true, the system will solve the kinematics objects then update the controllers and operations accordingly when create or update IK object
Created in NX1899.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
| autoSolve |
|
inline |
Sets the start orientation.
Created in NX1872.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
| startOrit | The start orientation matrix. |
|
inline |
Set reference tracer object.
Created in NX1899.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
| tracer |
|
getset |
Returns or sets the option of avoiding collision.
Created in NX1872.0.0
License requirements to get this property: nx_mcd_core ("Mechatronics Concept Designer")
License requirements to set this property: nx_mcd_core ("Mechatronics Concept Designer")
|
getset |
Returns or sets the Euler angle convention.
Created in NX1872.0.0
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("Mechatronics Concept Designer")
|
get |
Returns the list containing the defined frames.
Created in NX1872.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
|
getset |
Returns or sets the option of generating tracer object.
Created in NX1872.0.0
License requirements to get this property: nx_mcd_core ("Mechatronics Concept Designer")
License requirements to set this property: nx_mcd_core ("Mechatronics Concept Designer")
|
getset |
Returns or sets the name.
Created in NX1872.0.0
License requirements to get this property: nx_mcd_core ("Mechatronics Concept Designer")
License requirements to set this property: nx_mcd_core ("Mechatronics Concept Designer")
|
get |
Returns the rigid body.
Created in NX1872.0.0
License requirements: nx_mcd_core ("Mechatronics Concept Designer")
|
getset |
Returns or sets the start point.
Created in NX1872.0.0
License requirements to get this property: None.
License requirements to set this property: nx_mcd_core ("Mechatronics Concept Designer")
|
getset |
Returns or sets the type
Created in NX1872.0.0
License requirements to get this property: None.
License requirements to set this property: None.

